Penggunaan Incremental Encoder untuk Posisi Motor Analog
1. Tujuan [back]
1. Mengetahui pengertian rotary
encoder, incremental dan absolute encoder.
2. Mengetahui prinsip kerja rotary
encoder.
3. Membuat rangkaian encoder.
2. Alat dan Bahan [back]
E. Potentiometer
A.
IC NE555
|
IC 555 atau biasa disebut pewaktu 555 merupakan sebuah sirkuit atau rangkaian
terpadu yang digunakan untuk menghasilkan pewaktuan, gelombang kotak atau
multivibrator (sinyal penggetar). IC ini didesain oleh Hans R. Camenzind pada
tahun 1970 dan baru diperkenalkan setelah setahun kemudian yakni 1971 oleh
Signetics.
Cara
Kerja :
·
Bagian trigger, berfungsi untuk memberikan triger atau
perintah ke IC 555
sebagai tanda prosestimer dimulai
·
Bagian THReshold,
biasanya diberi kapasitor dan resistor variable untuk kecepatan waktu On Off
agar dapat diatur sesuai keinginan.
Susunan
Dan Fungsi Pin :
1. GND :
Ground (0 V)
2.TR : Pulsa
negatif pendek pada pin ini akan memberi perintah awal IC bekerja
3. Q :
output, keluaran yang akan dihubungkan pada beban. Bernilai positif (+)
4. R : Reset,
interval pewaktuan yang dapat disela dengan memberikan pulsa reset 0 V
5.CV :
Control Voltage, memungkinkan untuk mengakses pembagi tegangan internal (2/3
Vcc)
6. THR :
Threshold menentukan lama pewaktuan
7. DIS :
DIscharge, disambungkan ke kapasitor, dan waktu pengosongan muatan kapasitor menentukan lama inteval pewaktuan
8. V+ :
tegangan input positif (+ V) besarnya harus diantara 3-15 V
B.
Capacitor
Kapasitor
(C = Capacitor) atau juga disebut Kondensator (Condensator) merupakan Komponen
Elektronika Pasif yang bisa menyimpan muatan listrik dalam waktu yang sementara
dengan satuan kapasitansinya yakni Farad
C.
Motor
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang
dengan sistem kontrol umpan balik loop tertutup (servo),Sehingga dapat di
set-up atau di atur untuk menentukan dan memastikan posisi sudut dan poros
output motor
D.
Resistor
Resistor adalah komponen elektronika
yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir
dalam suatu rangkain elektronika. Sebagaimana fungsi resistoryang
sesuai namanya bersifat resistif dan termasuk salah satu komponen elektronika
dalam kategori komponen pasif. Satuan atau nilai resistansi suatu resistor di sebut Ohm dan
dilambangkan dengan simbol Omega (Ω
E.
Potensiometer (POT) adalah salah satu jenis
Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan
Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer merupakan
Keluarga Resistor yang tergolong dalam Kategori Variable Resistor. Secara struktur,
Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang
berfungsi sebagai pengaturnya
Pada dasarnya bagian-bagian penting dalam Komponen Potensiometer
adalah :
1.
Penyapu atau disebut juga
dengan Wiper
2.
Element Resistif
3.
Terminal
Grafik Respon
3.Dasar Teori [back]
Sekilas
Rotary Encoder
Rotary encoder adalah divais elektromekanik yang dapat memonitor gerakan dan
posisi. Rotary encoder umumnya menggunakan sensor optik untuk menghasilkan
serial pulsa yang dapat diartikan menjadi gerakan, posisi, dan arah. Sehingga
posisi sudut suatu poros benda berputar dapat diolah menjadi informasi berupa
kode digital oleh rotary encoder untuk diteruskan oleh rangkaian kendali.
Rotary encoder umumnya digunakan pada pengendalian robot, motor drive, dsb.
Rotary encoder tersusun
dari suatu piringan tipis yang memiliki lubang-lubang padabagian lingkaran
piringan. LED ditempatkan pada salah satu sisi piringan sehingga cahaya akan
menuju ke piringan. Di sisi yang lain suatu photo-transistor diletakkan
sehingga photo-transistor ini dapat mendeteksi cahaya dari LED yang
berseberangan. Piringan tipis tadi dikopel dengan poros motor, atau divais
berputar lainnya yang ingin kita ketahui posisinya, sehingga ketika motor
berputar piringan juga akan ikut berputar. Apabila posisi piringan
mengakibatkan cahaya dari LED dapat mencapai photo-transistor melalui
lubang-lubang yang ada, maka photo-transistor akan mengalami saturasi dan akan
menghasilkan suatu pulsa gelombang persegi. Gambar 1 menunjukkan bagan skematik
sederhana dari rotary encoder. Semakin banyak deretan pulsa yang dihasilkan
pada satu putaran menentukan akurasi rotary encoder tersebut, akibatnya semakin
banyak jumlah lubang yang dapat dibuat pada piringan menentukan akurasi rotary
encoder tersebut.

Rangkaian
penghasil pulsa yang digunakan umumnya memiliki output yang berubah dari +5V
menjadi 0.5V ketika cahaya diblok oleh piringan dan ketika diteruskan ke
photo-transistor. Karena divais ini umumnya bekerja dekat dengan motor DC maka
banyak noise yang timbul sehingga biasanya output akan dimasukkan ke low-pass
filter dahulu. Apabila low-pass filter digunakan, frekuensi cut-off yang
dipakai umumnya ditentukan oleh jumlah slot yang ada pada piringan dan seberapa
cepat piringan tersebut berputar, dinyatakan dengan:
Dimana fc adalah
frekuensi cut-off filter, sw adalah kecepatan
piringan dan n adalah jumlah slot pada piringan.
Incremental Encoder
Incremental encoder terdiri
dari dua track atau single track dan dua sensor yang disebut channel A dan B
(Gambar 7). Ketika poros berputar, deretan pulsa akan muncul di masing-masing
channel pada frekuensi yang proporsional dengan kecepatan putar sedangkan
hubungan fasa antara channel A dan B menghasilkan arah putaran. Dengan
menghitung jumlah pulsa yang terjadi terhadap resolusi piringan maka putaran
dapat diukur. Untuk mengetahui arah putaran, dengan mengetahui channel mana
yang leading terhadap channel satunya dapat kita tentukan arah putaran yang
terjadi karena kedua channel tersebut akan selalu berbeda fasa seperempat
putaran (quadrature signal). Seringkali terdapat output channel ketiga, disebut
INDEX, yang menghasilkan satu pulsa per putaran berguna untuk menghitung jumlah
putaran yang terjadi.
Gambar
1. susunan piringan untuk incremental encoder
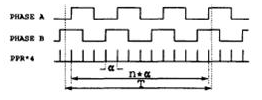
Contoh
pola diagram keluaran dari suatu incremental encoder ditunjukkan pada Gambar 8.
Resolusi keluaran dari sinyal quadrature A dan B dapat dibuat beberapa macam,
yaitu 1X, 2X dan 4X. Resolusi 1X hanya memberikan pulsa tunggal untuk setiap
siklus salah satu sinya A atau B, sedangkan resolusi 4X memberikan pulsa setiap
transisi pada kedua sinyal A dan B menjadi empat kali resolusi 1X. Arah putaran
dapat ditentukan melalui level salah satu sinyal selama transisi terhadap
sinyal yang kedua. Pada contoh resolusi 1X, A = arah bawah dengan B = 1
menunjukkan arah putaran searah jarum jam, sebaliknya B = arah bawah dengan A =
1 menunjukkan arah berlawanan jarum jam.
Gambar
2. Contoh pola keluaran incremental encoder
Gambar
3. output dan arah putaran pada resolusi yang berbeda-beda
Pada incremental encoder, beberapa
cara dapat digunakan untuk menentukan kecepatan yang diamati dari sinyal pulsa
yang dihasilkan. Diantaranya adalah menggunakan frequencymeter dan
periodimeter.
(1)
Cara yang sederhana untuk menentukan
kecepatan dapat dengan frequencymeter, yakni menghitung jumlah pulsa dari
encoder, n, pada selang waktu yang tetap, T, yang merupakan periode loop
kecepatan (Gambar 10). Apabila α adalah sudut antara pulsa encoder, maka sudut
putaran pada suatu periode adalah:
2
(2)
Sehingga kecepatan putar akan kita dapatkan sebagai:
(3)
Kelemahan
yang muncul pada cara ini adalah pada setiap periode sudut αf yang
didapat merupakan kelipatan integer dari α. Ini akan dapat menghasilkan
quantification error pada kecepatan yang ingin diukur.
Gambar
4. Sinyal keluaran encoder untuk pengukuran kecepatan dengan frequencymeter
Cara yang lain adalah dengan
menggunakan periodimeter. Dengan cara ini kita akan mengukur kecepatan tidak
lagi dengan menghitung jumlah pulsa encoder tetapi dengan menghitung clock
frekuensi tinggi (HF Clock) untuk sebuah pulsa dari encoder yaitu mengukur periode
pulsa dari encoder (Gambar 11). Apabila αp adalah sudut dari
pulsa encoder, t adalah periode dari HF clock, dan n adalah jumlah pulsa HF
yang terhitung pada counter. Maka waktu untuk sebuah pulsa encoder, Tp,
adalah:
(4)
Sehingga
kecepatan yang akan kita ukur dapat kita peroleh dengan:
(5)
Seperti halnya pada frequencymeter, disini juga muncul
quantification error karena waktu Tp akan selalu merupakan
perkalian integer dengan t.
Gambar
5. Pengukuran kecepatan dengan menggunakan Periodimeter
Keuntungan Incremental Encoder
1. Baik untuk penghitungan pulsa sederhana atau aplikasi
pemantauan frekuensi seperti kecepatan, arah, dan pemantauan posisi
2. Lebih hemat biaya dan lebih kompleks daripada enkoder
mutlak
3. A, B, Z, dan sinyal terbalik sebagai HTL (Dorong-Tarik)
atau TTL (RS422).
4. Setiap pulsa menghitung hingga 16384 PPR yang
tersedia
5. Fungsionalitas penskalaan yang fleksibel.
6. Prinsipnya menggunakan pengukuran magnetik.
7. Pembuat enkode tambahan memiliki resolusi hingga
50.000 PPR.
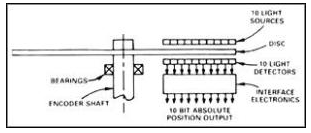
Absolute Encoder
ABSOLUTE ROTARY ENCODER
Absolute encoder menggunakan
piringan dan sinyal optik yang diatur sedemikian sehingga dapat menghasilkan
kode digital untuk menyatakan sejumlah posisi tertentu dari poros yang
dihubungkan padanya. Piringan yang digunakan untuk absolut encoder tersusun dari
segmen-segmen cincin konsentris yang dimulai dari bagian tengah piringan ke
arah tepi luar piringan yang jumlah segmennya selalu dua kali jumlah segmen
cincin sebelumnya. Cincin pertama di bagian paling dalam memiliki satu segmen
transparan dan satu segmen gelap, cincin kedua memiliki dua segmen transparan
dan dua segmen gelap, dan seterusnya hingga cincin terluar. Sebagai contoh
apabila absolut encoder memiliki 16 cincin konsentris maka cincin terluarnya
akan memiliki 32767 segmen. Gambar 3 menunjukkan pola cincin pada piringan
absolut encoder yang memiliki 16 cincin.
Contoh susunan pola 16 cincin konsentris pada
absolut encoder
Karena
setiap cincin pada piringan absolute encoder memiliki jumlah segmen kelipatan
dua dari cincin sebelumnya, maka susunan ini akan membentuk suatu sistem biner.
Untuk menghasilkan sistem biner pada susunan cincin maka diperlukan pasangan
LED dan photo-transistor sebanyak jumlah cincin yang ada pada absolut encoder
tersebut.
Contoh
piringan dengan 10 cincin dan 10 LED – photo-transistor untuk membentuk sistem
biner 10 bit.
Sistem
biner yang untuk menginterpretasi posisi yang diberikan oleh absolute encoder
dapat menggunakan kode gray atau kode biner biasa, tergantung dari pola cincin
yang digunakan. Untuk lebih jelas, kita lihat contoh absolut encoder yang hanya
tersusun dari 4 buah cincin untuk membentuk kode 4 bit. Apabila encoder ini
dihubungkan pada poros, maka photo-transistor akan mengeluarkan sinyal persegi
sesuai dengan susunan cincin yang digunakan. Gambar 5 dan 6 menunjukkan contoh
perbedaan diagram keluaran untuk absolute encoder tipe gray code dan tipe
binary code.
Contoh
diagram keluaran absolut encoder 4-bit tipe gray code
Dengan
absolute encoder 4-bit ini maka kita akan mendapatkan 16 informasi posisi yang
berbeda yang masing-masing dinyatakan dengan kode biner atau kode gray
tertentu. Tabel 1 menyatakan posisi dan output biner yang bersesuaian untuk
absolut encoder 4-bit. Dengan membaca output biner yang dihasilkan maka posisi
dari poros yang kita ukur dapat kita ketahui untuk diteruskan ke rangkaian
pengendali. Semakin banyak bit yang kita pakai maka posisi yang dapat kita
peroleh akan semakin banyak.
Contoh
diagram keluaran absolut encoder 4-bit tipe binary code
Output
biner dan posisi yang bersesuaian pada absolute encoder 4-bit
Kelebihan Absolute Encoder
1. Mengingat posisinya setelah pemadaman listrik dan
menawarkan pemantauan posisi berkelanjutan.
2. Biasanya memiliki fungsi speed, scaling, preset, dan
fieldbus.
3. Memungkinkan Anda untuk menentukan posisi yang tepat dari
suatu mesin dan mengendalikan
penyimpanan data elektronik.
4. Beberapa opsi antarmuka: Analog, Ethernet, Fieldbus,
Paralel, Serial.
5. Single-turn dan opsi revolusi multi-turn tersedia.
6. Prinsip pengukuran magnetik.
7. Encoder absolut memiliki resolusi hingga 16 bit, atau
65.536 pulsa per revolusi (PPR).
4.Percobaan [back]
Prinsip Kerja:
Bagian trigger pada IC 555 memberikan trigger atau perintah
dimulai ke ic 555, Vcc pada IC 555 menginputkan tegangan sebesar 5 volt. Terjadi
pembagian arus ke R1, C1, dan Motor.
C1 paralel dengan Vcc IC 555 sehingga tegangan di C1 adalah
5 volt, dan diteruskan ke ground. Arus yang masuk ke R1 diteruskan ke
potensiometer dan pembagi arus ke R2 dan D1, dan masuk ke C2 yang selanjutnya
diteruskan ke ground. Tegangan pada Control Voltage masuk ke C3 yang
nilainya 3.33 V karena nilai control
voltage biasanya 2/3 V dan arus pada C3 masuk ke motor dan ground.
pin Q yang merupakan output dihubungkan ke R3 dan D2 yang
nilainya positif. Tegangan masuk ke motor dari Vcc dan tegangan dari C3
sehingga motor Aktif dan tegangan di motor sama dengan tegangan di Vcc dan C1.
5.Video [back]
6.Link Download [back]
Datasheet IC NE555 -
download
Rangkaian Proteus -
download
Video Simulasi -
download
File Html -
download